
|
Marine systems simulation
|
|
|
Marine systems simulation
|
A general sine source.
 Collaboration diagram for Sine wave:
Collaboration diagram for Sine wave:Sine is a trigonometric function (function of an angle). The sine function gives the ratio of the length of the side opposite to an angle, to the length of the hypotenuse.
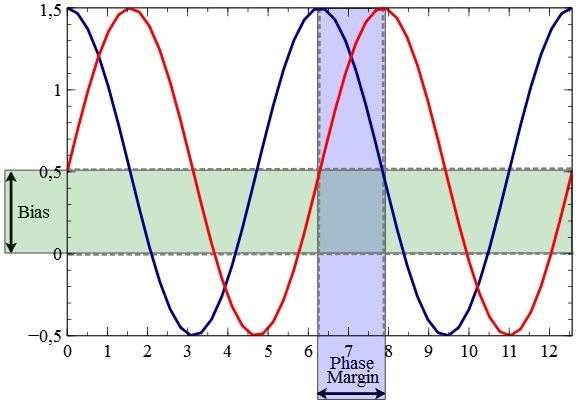
The bias represents the offset from zero to the average value of the sine function. The phase margin is the angle between the two sine waves. In the figure above, the phase margin is set to pi/2 and the bias is set to 0.5.
This function has no inputs.
| Name | Width | Description |
|---|---|---|
| Out | <PortWidth> | The sine signal |
| OutDot | <PortWidth> | The derivative of the sine signal |
| Name | Width | Description |
|---|---|---|
| PortWidth | The number of elements in the signal. | |
| Amplitude | <PortWidth> |
The signal amplitude |
| PhaseRad | <PortWidth> |
The phase of the signal in radians |
| PhaseDeg | <PortWidth> | The phase of the signal in degrees |
| FHz | <PortWidth> |
The signal frequency [Hz]. This parameter is overridden by PeriodS |
| PeriodS | <PortWidth> | Period of the signal (sec). Overrides parameter FHz |
| Bias | <PortWidth> |
The amplitude bias (offset from zero to the mean value of the sine wave) |
| StartTime | <PortWidth> |
The time to start the step. This may either be a scalar, or a comma separated list referring to the different elements of the signal. |
| StopTime | <PortWidth> |
The time to stop the step. This may either be a scalar, or a comma separated list referring to the different elements of the signal. If this is negative, this is a true step function with unlimited duration. If it is larger than zero, it is a pulse function, which goes back to the StartValue after the StopTime. |
This SimObject contains no initial conditions.
This SimObject is referred to as Src/Sine