
|
Marine systems simulation
|
|
|
Marine systems simulation
|
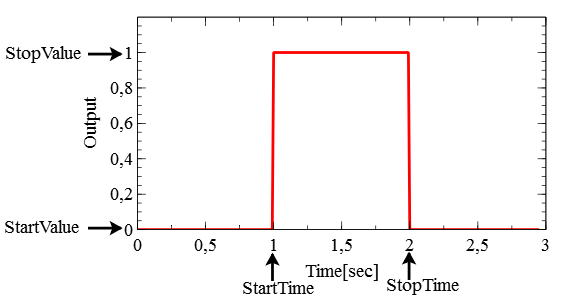
Step signal.
 Collaboration diagram for Step:
Collaboration diagram for Step:This is a combined step and pulse signal SimObject. It has no input port, and has one output port with a scalar or vector signal.
This function has no inputs.
| Name | Width | Description |
|---|---|---|
| Out | <PortWidth> | The step output signal |
| OutDot | <PortWidth> | The derivative of the step output signal |
| Name | Width | Description |
|---|---|---|
| PortWidth | The number of elements in the signal. | |
| StartValue | <PortWidth> |
The start value of the output port. This may either be a scalar, or a comma separated list refering to the different elements of the signal. |
| StopValue | <PortWidth> |
The stop value of the output port. This may either be a scalar, or a comma separated list refering to the different elements of the signal. |
| StartTime | <PortWidth> |
The time to start the step. This may either be a scalar, or a comma separated list referrint to the different elements of the signal. |
| StopTime | <PortWidth> |
The time to stop the step. This may either be a scalar, or a comma separated list referrint to the different elements of the signal. If this is negative, this is a true step function with unlimited duration. If it is larger than zero, it is a pulse function, which goes back to the StartValue after the StopTime. |
There are no initial conditions for this function.
This SimObject is referred to as Src/Step